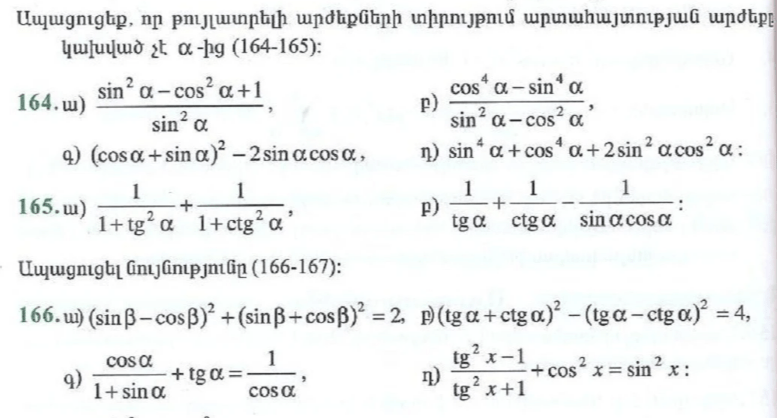
- ա) sin2α — cos2α + 1 / sin2α = sin2α — cos2α + sin2α + cos2α / sin2α = 2sin2α/sin2α = 2
բ) cos4α — sin4α / sin2α — cos2α = (cos2α — sin2α)(cos2α + sin2α) / sin2α — cos2α = cos2α — sin2α / sin2α — cos2α = -(cos2α — sin2α) / cos2α — sin2α = -1
գ) (cosα — sinα)2 — 2sinαcosα = cos2α +2sinαcosα + sin2α — 2sinαcosα = cos2α + sin2α = 1
դ) sin4α — cos4α + 2sin2αcos2α = (sin2α + cos2α)2 = 1^2 = 1
- ա) 1/tg2α + 1/ctg2α = 1 / 1/cos2α + 1 / 1/sin2α = cos2α + sin2α = 1
բ) 1/tgα + 1/ctgα — 1/sinαcosα = ctgα + tgα — 1/sinαcosα = cosα/sinα + sinα/cosα — 1/sinαcosα = cos2α + sin2α — 1 / sinαcosα = 0
- ա) (sinβ — cosβ)2 + (sinβ + cosβ)2 = 2
sin2β — 2sinβcosβ + cos2β + sin2β + 2sinβcosβ + cos2β = 2(sin2β + cos2β) = 2
բ) (tgα + ctgα)2 — (tgα — ctgα)2 = 4
(tgα + ctgα)2 — (tgα — ctgα)2 = tg2α + 2tgαctgα + ctg2α — tg2α + 2tgαctgα — ctg2α = 4tgαctgα = 4
գ) tg2x — 1 / tg2x + 1 +cos2x = sin2x
tg2x — 1 / tg2x + 1 + cos2x = tg2x — 1 + cos2x * (sin2x/cos2x + 1) / tg2x + 1 = tg2x — 1 + sin2x + cos2x / tg2x + 1 = tg2x/tg2x + 1 = sin2x / cos2x * 1/cos2x = sin2x
